








Introducción
En el mundo de la robótica, seleccionar el chasis adecuado es fundamental para el éxito de tu proyecto. En este artículo, exploraremos los Mejores chasis de aluminio para robots tipo Rover, ideales para quienes buscan robustez, ligereza y versatilidad en sus construcciones. Los chasis de aluminio no solo ofrecen una excelente relación de peso y resistencia, sino que también son altamente personalizables, lo que los hace perfectos para proyectos de robótica educativa y hobby.
Mejores chasis de aluminio para robots tipo Rover
Al elegir un chasis de aluminio, es importante considerar varios factores como el tamaño, la compatibilidad con componentes electrónicos y la facilidad de montaje. A continuación, te presentamos una lista de algunos de los mejores chasis disponibles en el mercado chileno.
1. Chasis Rover 4WD de Aluminio
Este chasis es ideal para proyectos que requieren un diseño compacto y una alta maniobrabilidad. Con su estructura de aluminio, ofrece una gran resistencia y durabilidad.
- Dimensiones: 300mm x 250mm
- Peso: 1.5 kg
- Compatibilidad: Arduino y Raspberry Pi
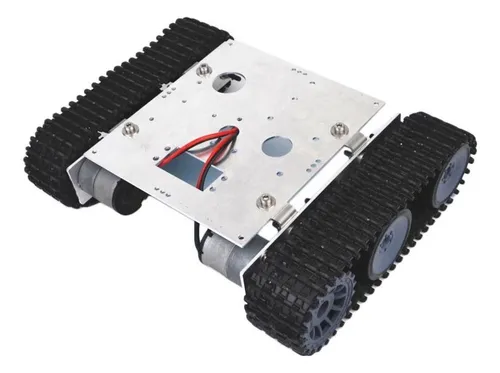
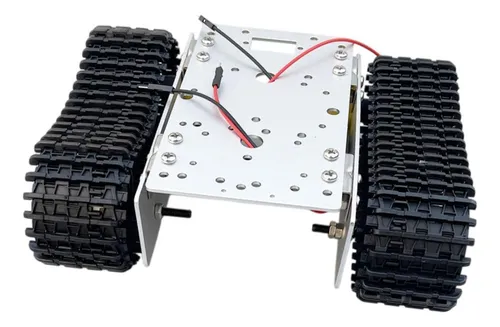
2. Chasis de Aluminio para Robot de Exploración
Diseñado para terrenos difíciles, este chasis cuenta con suspensión y ruedas grandes, lo que permite una excelente tracción.
- Dimensiones: 400mm x 300mm
- Peso: 2.3 kg
- Compatibilidad: Módulos de control de motores
3. Chasis Modular de Aluminio
Este chasis se destaca por su modularidad, permitiendo a los makers personalizar su diseño según las necesidades del proyecto.
- Dimensiones: Variable según configuración
- Peso: Aproximadamente 1.8 kg
- Compatibilidad: Varios microcontroladores y sensores
Materiales Necesarios
Para construir tu robot tipo Rover con uno de los mejores chasis de aluminio, necesitarás los siguientes materiales:
- Chasis de aluminio (según elección)
- Motor DC o servomotores
- Batería recargable
- Controlador de motores
- Microcontrolador (Arduino o Raspberry Pi)
- Ruedas y ejes
- Conectores y cables
Código de Ejemplo
A continuación, te mostramos un código básico para controlar un robot tipo Rover utilizando Arduino:
#include // Librería para motoresAF_DCMotor motor1(1); // Motor 1 conectado al canal 1void setup() { motor1.setSpeed(200); // Velocidad del motor} void loop() { motor1.run(FORWARD); // Mueve el motor hacia adelante delay(1000); motor1.run(RELEASE); // Detiene el motor delay(1000);} Errores Comunes y Consejos de Experto
Al trabajar con chasis de aluminio para robots tipo Rover, es fácil cometer algunos errores. Aquí hay algunos consejos para evitar problemas:
- Revisa la compatibilidad: Asegúrate de que todos los componentes sean compatibles entre sí.
- Montaje sólido: Utiliza tornillos y tuercas de calidad para asegurar todas las partes del chasis.
- Pruebas iniciales: Realiza pruebas en un área controlada antes de aventurarte en terrenos difíciles.
Para más información sobre robótica y componentes, puedes visitar Arduino.cc.


