Introducción
En el campo de la robótica, los motores BLDC con control de campo (FOC) para robótica se están convirtiendo en una elección popular para aplicaciones que requieren un alto rendimiento y eficiencia. Gracias a su diseño sin escobillas y su capacidad para ofrecer un control preciso de la velocidad y el par motor, estos motores son ideales para proyectos de robótica que demandan precisión y fiabilidad.
Motores BLDC con control de campo (FOC) para robótica
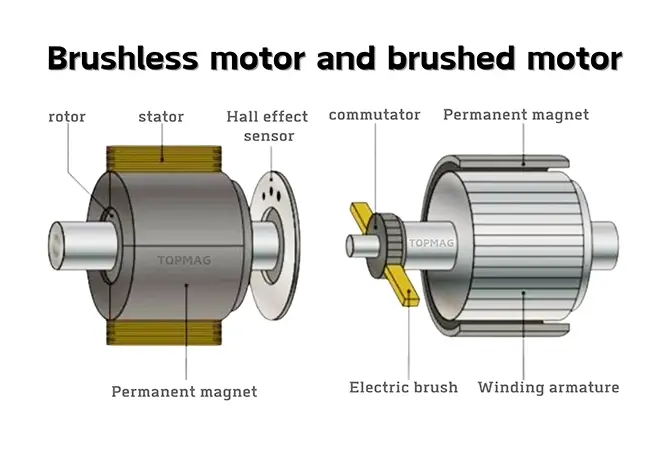
Los motores BLDC (Brushless DC) son conocidos por su alta eficiencia y larga vida útil. El control de campo (FOC) es una técnica que permite controlar estos motores de manera más precisa, mejorando la respuesta dinámica y reduciendo el ruido. Esto es particularmente valioso en aplicaciones robóticas donde la suavidad del movimiento es crucial.
Características de los motores BLDC
- Alta eficiencia energética.
- Menor mantenimiento debido a la ausencia de escobillas.
- Mejor rendimiento en comparación con los motores de corriente alterna.
- Control preciso de velocidad y par motor.
Componentes necesarios
Para implementar motores BLDC con control de campo (FOC) en tus proyectos, necesitarás los siguientes componentes:
- Motor BLDC.
- Controlador FOC (por ejemplo, un ESC compatible).
- Microcontrolador (como Arduino o Raspberry Pi).
- Fuente de alimentación adecuada.
- Placa de desarrollo y cables de conexión.
Código de ejemplo
A continuación, se presenta un ejemplo básico de cómo controlar un motor BLDC utilizando Arduino:
#include // Incluimos la librería Servo para controlar el ESC
Servo esc; // Creamos un objeto Servo para el ESC
void setup() {
esc.attach(9); // Conectamos el ESC al pin 9
esc.write(0); // Inicializamos el ESC en 0
}
void loop() {
for (int i = 0; i = 0; i--) {
esc.write(i); // Disminuimos la velocidad del motor
delay(15);
}
}
Errores comunes y consejos de experto
Al trabajar con motores BLDC y controladores FOC, es fácil cometer algunos errores comunes. Aquí hay algunos consejos para evitar problemas:
- Verifica las conexiones: Asegúrate de que todas las conexiones están firmes y correctas para evitar cortocircuitos.
- Calibra el ESC: Antes de comenzar, calibra tu controlador ESC siguiendo las instrucciones del fabricante.
- Monitorea la temperatura: Los motores pueden calentarse; verifica que no sobrepasen temperaturas críticas.
- Usa un suministro de energía adecuado: Asegúrate de que la fuente de alimentación puede proveer suficiente corriente para tu motor.
Disponibilidad en Chile
En Chile, puedes encontrar motores BLDC y controladores FOC en diversas tiendas de electrónica y plataformas en línea. Asegúrate de elegir componentes de calidad para obtener el mejor rendimiento en tus proyectos robóticos.
Conclusión
Los motores BLDC con control de campo (FOC) para robótica ofrecen un excelente rendimiento y son una opción ideal para proyectos que requieren un control preciso. Con los componentes adecuados y un poco de práctica, podrás implementar soluciones robóticas efectivas y eficientes.
Para más información técnica, visita Arduino.cc.