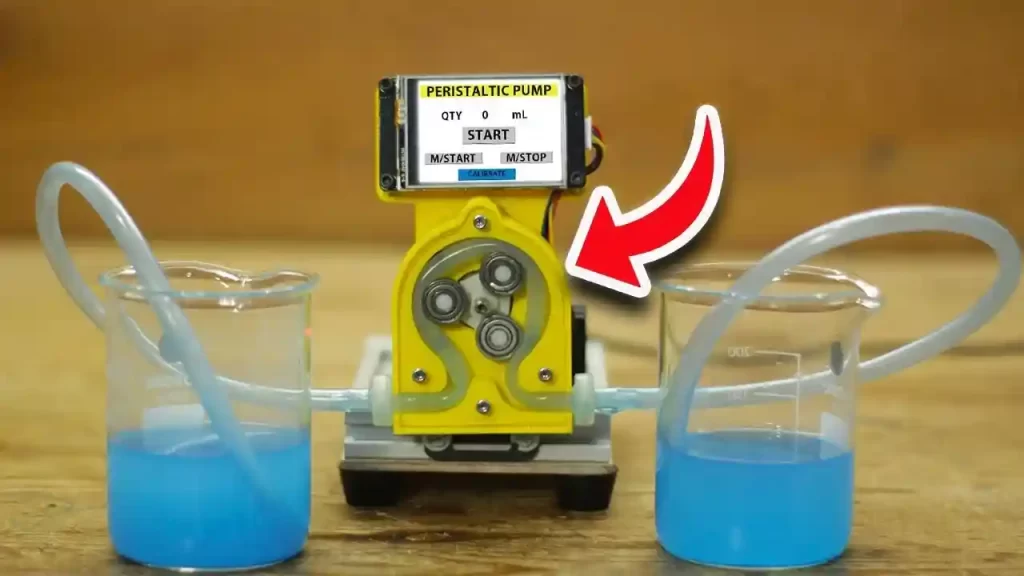
Bomba Peristáltica Controlada por Arduino: Dosificación Precisa
En el mundo de la robótica y la electrónica, la precisión es clave, especialmente cuando se trata de manejar líquidos. Una bomba peristáltica controlada por Arduino: dosificación ofrece una solución eficiente para lograr un control preciso en aplicaciones de dosificación líquida. Este artículo explora cómo los makers y entusiastas en Chile pueden implementar esta tecnología utilizando una placa de desarrollo Arduino.

Bomba Peristáltica Controlada por Arduino: Dosificación
La bomba peristáltica controlada por Arduino: dosificación permite mover líquidos de manera controlada mediante un sistema de rodillos que comprimen un tubo flexible. Este tipo de bomba es ideal para aplicaciones donde la pureza del líquido es crucial, ya que el líquido nunca entra en contacto con los componentes mecánicos de la bomba.
Componentes y Materiales Necesarios
- Placa de desarrollo Arduino Uno
- Bomba peristáltica de 12V
- Driver de motor L298N
- Fuente de alimentación de 12V
- Cables de conexión
- Tubos para bomba peristáltica
Implementación del Sistema
Para implementar este sistema, es necesario conectar la bomba peristáltica al driver de motor L298N, que será controlado por el Arduino. Esto permite regular la velocidad y dirección del motor, logrando una dosificación precisa.
const int in1 = 2; // Pin IN1 del L298N
const int in2 = 3; // Pin IN2 del L298N
const int enA = 9; // Pin ENA del L298N
void setup() {
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(enA, OUTPUT);
analogWrite(enA, 255); // Velocidad máxima
}
void loop() {
// Gira la bomba en una dirección
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
delay(5000);
// Detener la bomba
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
delay(2000);
}Errores Comunes y Consejos de Experto
- Problema de conexión: Verifica siempre las conexiones del driver de motor al Arduino y la bomba.
- Alimentación insuficiente: Asegúrate de que la fuente de alimentación sea adecuada para la bomba peristáltica de 12V.
- Ajuste de velocidad: Utiliza PWM en el pin ENA para controlar la velocidad del motor según sea necesario.
En Chile, estos componentes están disponibles en tiendas especializadas en electrónica y plataformas de comercio en línea, facilitando su adquisición para proyectos maker.
Para más información sobre el uso de Arduino en proyectos de robótica, visita la página oficial de Arduino.