La localización de robots en interiores es un desafío complejo que ha sido abordado por diversos métodos y algoritmos. Uno de los enfoques más efectivos es el uso de la Localización Monte Carlo (AMCL) en ROS para robots en interiores, que permite a los robots determinar su posición y orientación en un entorno desconocido. Esta técnica es especialmente útil en aplicaciones como la robótica de servicio, la logística y la exploración de entornos desconocidos.

¿Qué es y para qué sirve?
La Localización Monte Carlo (AMCL) es un algoritmo de localización que utiliza una serie de partículas para representar la posición y orientación del robot en un espacio de estado. Este algoritmo es especialmente útil en entornos con poca información o con alta incertidumbre. Para obtener más información sobre este algoritmo, se puede consultar la Documentación oficial ROS, que proporciona una descripción detallada de su funcionamiento y aplicaciones.
Tipos y variantes disponibles
Existen varios tipos y variantes de algoritmos de localización, cada uno con sus propias ventajas y desventajas. A continuación, se presentan algunos de los tipos principales:

- Localización basada en odometría: utiliza la información de la odometría del robot para estimar su posición y orientación.
- Localización basada en sensores: utiliza la información de sensores como láser, cámaras y GPS para estimar la posición y orientación del robot.
- Localización híbrida: combina la información de la odometría y sensores para obtener una estimación más precisa de la posición y orientación del robot.
Localización Monte Carlo (AMCL) en ROS para robots en interiores — Cómo elegir o implementar
La elección del algoritmo de localización adecuado depende de varios factores, como la precisión requerida, la complejidad del entorno y los recursos disponibles. A continuación, se presenta una comparativa de las opciones más comunes:

Para AGV,AMR, carretillas elevadoras láser, robot de navegación exterior VanJee WLR-720 3D LiDAR sensor LiDAR de navegación híbrida de 16 líneas
$2299.00 -0%
| Algoritmo | Precisión | Complejidad |
|---|---|---|
| Localización Monte Carlo (AMCL) | Alta | Media |
| Localización basada en odometría | Baja | Baja |
| Localización basada en sensores | Media | Alta |
| Localización híbrida | Alta | Alta |
Materiales y componentes necesarios
Para implementar un sistema de localización en un robot, se requieren varios componentes y materiales. A continuación, se presentan algunos de los más comunes:
- Robot móvil con capacidad de movimiento
- Sistema de navegación (GPS, láser, cámaras)
- Sensores de odometría (codificadores, acelerómetros)
- Plataforma de desarrollo de software (ROS, Python)
Si estás en Chile, puedes consigue componentes para robots aquí directamente desde la tienda con despacho a todo el país.
Guía paso a paso
La implementación de un sistema de localización en un robot requiere varios pasos. A continuación, se presentan los pasos más comunes:
- Instalación de la plataforma de desarrollo de software (ROS, Python)
- Configuración del sistema de navegación (GPS, láser, cámaras)
- Calibración de los sensores de odometría (codificadores, acelerómetros)
- Implementación del algoritmo de localización (AMCL, odometría, sensores)
- Pruebas y validación del sistema de localización
- Integración con otros sistemas del robot (control de movimiento, planificación de ruta)
Este tipo de proyectos tiene mucha documentación disponible. For more in-depth guides, check out robotics navigation tutorials.
Errores comunes y cómo evitarlos
La implementación de un sistema de localización en un robot puede estar sujeta a varios errores comunes. A continuación, se presentan algunos de los más comunes y cómo evitarlos:
- Error en la calibración de los sensores de odometría: verificar la configuración y calibración de los sensores
- Error en la implementación del algoritmo de localización: verificar la implementación y pruebas del algoritmo
- Error en la integración con otros sistemas del robot: verificar la integración y pruebas de los sistemas
Consejos de experto
A continuación, se presentan algunos consejos de experto para la implementación de un sistema de localización en un robot:
- Utilizar una plataforma de desarrollo de software estable y bien documentada (ROS, Python)
- Calibrar y verificar los sensores de odometría y navegación
- Implementar y probar el algoritmo de localización de manera exhaustiva
- Integrar el sistema de localización con otros sistemas del robot de manera cuidadosa
Preguntas frecuentes
¿Qué es la Localización Monte Carlo (AMCL)?
La Localización Monte Carlo (AMCL) es un algoritmo de localización que utiliza una serie de partículas para representar la posición y orientación del robot en un espacio de estado.
¿Cuál es la precisión de la Localización Monte Carlo (AMCL)?
La precisión de la Localización Monte Carlo (AMCL) depende de varios factores, como la cantidad de partículas, la resolución del mapa y la precisión de los sensores.
¿Cuál es el propósito de la calibración de los sensores de odometría?
El propósito de la calibración de los sensores de odometría es asegurarse de que los sensores proporcionen mediciones precisas y consistentes.
¿Cuál es el beneficio de utilizar una plataforma de desarrollo de software estable y bien documentada?
El beneficio de utilizar una plataforma de desarrollo de software estable y bien documentada es que proporciona una base sólida para la implementación del sistema de localización y reduce el riesgo de errores y problemas.
¿Cuál es el próximo paso después de implementar el sistema de localización?
El próximo paso después de implementar el sistema de localización es integrar el sistema con otros sistemas del robot, como el control de movimiento y la planificación de ruta.
CONCLUSIÓN
La implementación de un sistema de localización en un robot es un proceso complejo que requiere una cuidadosa planificación y ejecución. La Localización Monte Carlo (AMCL) en ROS para robots en interiores es una técnica efectiva para determinar la posición y orientación del robot en un entorno desconocido. Siguiendo los pasos y consejos presentados en este artículo, se puede implementar un sistema de localización preciso y fiable en un robot.
También te puede interesar:
Motores con reductora planetaria vs de engranajes rectos
Producto relacionado en AliExpress
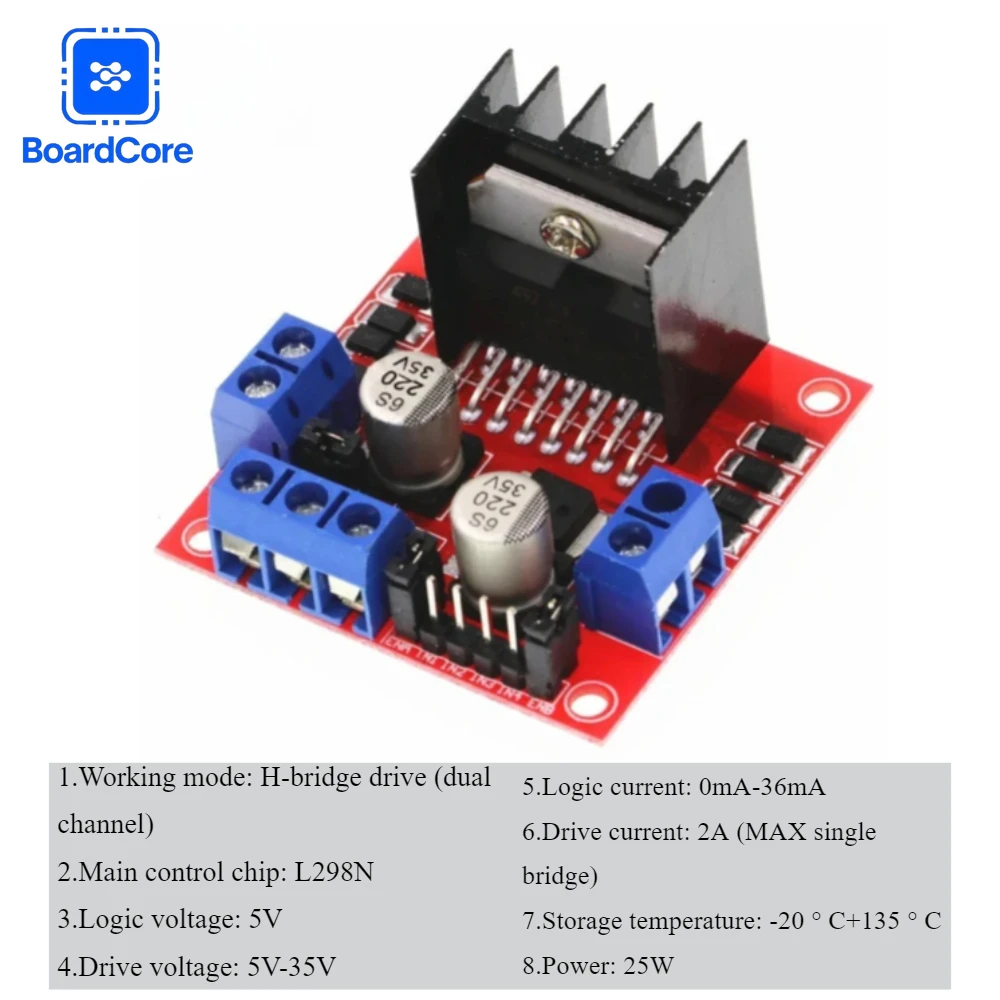
Módulo Controlador de Motor L298N, Puente H Dual para Arduino, Raspberry Pi, Automatización de Robots y Coches Inteligentes (1 Unidad)
$4.99 -50%