En el mundo de la automatización y control industrial, es fundamental comprender los diferentes tipos de dispositivos que se utilizan para gestionar procesos. Entre ellos, los autómatas programables son esenciales. En este artículo, exploraremos las autómatas programables: diferencias entre PLC y microcontrolador, destacando sus características, aplicaciones y cuándo utilizar cada uno.
¿Qué es un PLC?
Un PLC (Controlador Lógico Programable) es un dispositivo diseñado específicamente para aplicaciones de automatización industrial. Su principal objetivo es controlar maquinaria y procesos en tiempo real, permitiendo la entrada y salida de datos de diferentes sensores y actuadores.
Características de los PLC
Diseño robusto y resistente a condiciones adversas.
Programación mediante lenguajes específicos como Ladder Logic o Structured Text.
Capacidad para manejar múltiples entradas y salidas simultáneamente.
Conectividad con otros sistemas industriales y protocolos de comunicación.
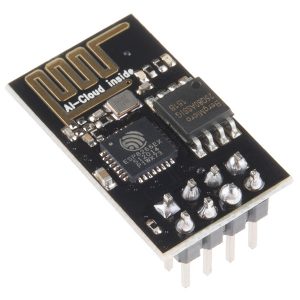
¿Qué es un Microcontrolador?
Un microcontrolador es un pequeño ordenador en un solo chip, que contiene un procesador, memoria y periféricos de entrada/salida. Estos componentes son ampliamente utilizados en proyectos de robótica, electrónica y prototipado.
Características de los Microcontroladores
Versatilidad y bajo costo, ideales para hobbistas y proyectos pequeños.
Programación a través de diferentes lenguajes como C o C++.
Integración de múltiples funciones en un solo chip.
Uso en aplicaciones desde juguetes hasta sistemas de control industrial.
Autómatas Programables: Diferencias entre PLC y Microcontrolador
Al evaluar autómatas programables: diferencias entre PLC y microcontrolador, es importante considerar varios factores:
1. Aplicación
Los PLC son ideales para aplicaciones industriales donde se requiere alta fiabilidad y robustez. Por otro lado, los microcontroladores son más adecuados para proyectos de menor escala y en entornos menos críticos.
2. Programación
La programación de un PLC suele ser más intuitiva para quienes trabajan en la industria, mientras que los microcontroladores requieren conocimientos de programación más avanzados.
3. Conectividad
Los PLC generalmente ofrecen mejores opciones de conectividad con otros equipos industriales, mientras que los microcontroladores pueden necesitar módulos adicionales para conectarse a otros dispositivos.
4. Robustez
Los PLC están diseñados para funcionar en condiciones extremas, mientras que los microcontroladores son más sensibles a factores como temperatura y humedad.
¿Cuándo utilizar un PLC y cuándo un Microcontrolador?
La elección entre un PLC y un microcontrolador dependerá de los requisitos específicos del proyecto:
Si se trata de un sistema de control industrial que requiere alta disponibilidad y fiabilidad, un PLC es la mejor opción.
Para proyectos de robótica o prototipos, donde el costo y la flexibilidad son primordiales, los microcontroladores son más adecuados.
Conclusión
En resumen, al considerar los autómatas programables: diferencias entre PLC y microcontrolador, es crucial entender las especificaciones y aplicaciones de cada uno. Ambos dispositivos tienen su lugar en el mundo de la automatización, y la elección correcta dependerá de las necesidades específicas del proyecto.
Para más información técnica sobre microcontroladores y PLC, puedes visitar Wikipedia.
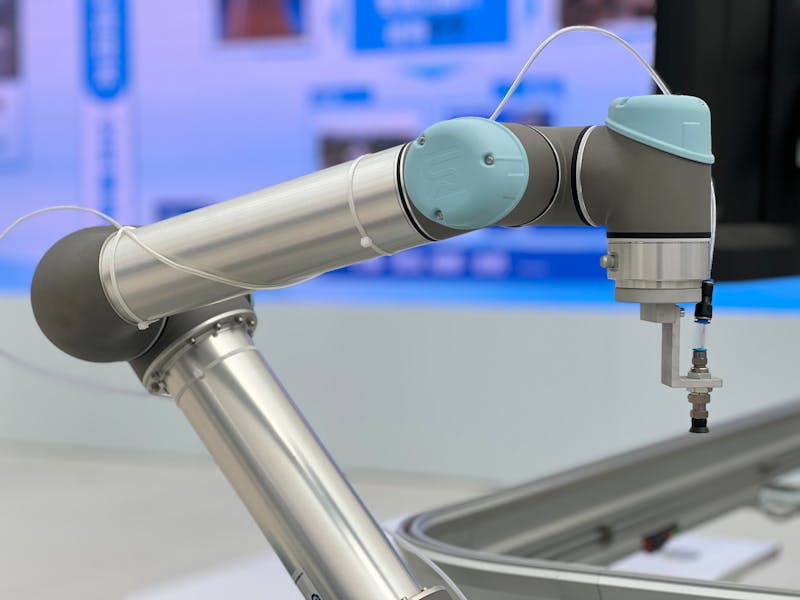
En la actualidad, los brazos robóticos colaborativos (Cobots): precios y marcas son una tendencia en crecimiento en la automatización industrial y en proyectos de robótica personales. Estos dispositivos están diseñados para trabajar junto a los seres humanos, ofreciendo una gran flexibilidad y eficiencia en diversas aplicaciones. Con la evolución de la tecnología, los cobots se han vuelto más accesibles y versátiles, permitiendo a empresas y entusiastas explorar nuevas posibilidades en sus proyectos.
Brazos robóticos colaborativos (Cobots): Precios y marcas
Brazos Robóticos Colaborativos (Cobots): Precios y Marcas
La elección de un brazo robótico colaborativo depende de varios factores, incluyendo el precio, la marca y las especificaciones técnicas. A continuación, exploraremos algunas de las marcas más reconocidas en el mercado y los precios aproximados de sus productos.
Marcas Destacadas de Cobots
UR (Universal Robots): Esta marca danesa es una de las pioneras en la fabricación de brazos robóticos colaborativos. Sus modelos, como el UR3, UR5 y UR10, tienen precios que oscilan entre los $40,000 y $75,000, dependiendo de la carga útil y el alcance.
KUKA: Con una larga trayectoria en el sector de la automatización, KUKA ofrece el modelo LBR iiwa, que se encuentra en un rango de precios similar a los de UR, orientado hacia aplicaciones industriales.
ABB: ABB es otra marca líder que presenta su modelo YuMi, un cobot que destaca por su precisión y versatilidad. Los precios de YuMi pueden variar entre $50,000 y $70,000.
Techman Robot: Este fabricante taiwanés ha creado cobots que son más asequibles, con precios que comienzan alrededor de $30,000, lo que los hace atractivos para pequeñas y medianas empresas.
Doosan Robotics: Con su línea de cobots, Doosan ofrece opciones competitivas en cuanto a precio y calidad, con modelos que rondan entre los $30,000 y $50,000.
Factores a Considerar al Comprar un Cobot
Al evaluar los brazos robóticos colaborativos, es importante considerar varios aspectos para asegurar que se adapte a las necesidades específicas de tu proyecto:
Carga útil: Determina cuánto peso puede levantar el brazo robótico, lo que influirá en las tareas que puedes realizar.
Alcance: El tamaño y el rango de movimiento del brazo son cruciales, especialmente si se necesita operar en espacios reducidos.
Facilidad de programación: Algunos modelos ofrecen interfaces más amigables, ideales para aquellos que son nuevos en la programación de robótica.
Compatibilidad: Verifica si el cobot es compatible con otras herramientas o componentes en tu proyecto.
Las Aplicaciones de los Cobots en la Industria
Los brazos robóticos colaborativos están revolucionando diversas industrias al facilitar tareas que tradicionalmente eran realizadas por humanos. Algunas de las aplicaciones más comunes incluyen:
Laboratorio de electrónica
Montaje: En líneas de producción, los cobots pueden ayudar a ensamblar componentes, aumentando la eficiencia.
Packing: Estos brazos pueden encargarse del empaquetado de productos, optimizando el tiempo y reduciendo el riesgo de errores.
Inspección: Los cobots equipados con cámaras y sensores pueden realizar tareas de control de calidad de manera precisa.
Manipulación de piezas: Son ideales para mover piezas pesadas o delicadas, minimizando el riesgo de lesiones en el personal humano.
El Futuro de los Brazos Robóticos Colaborativos
El futuro de los brazos robóticos colaborativos (Cobots): precios y marcas parece prometedor. Con el avance continuo de la inteligencia artificial y la robótica, es probable que veamos un aumento en la adopción de cobots en diversas industrias. Esto no solo facilitará la automatización de procesos, sino que también permitirá a las empresas mejorar su competitividad al reducir costos y aumentar la productividad.
Conclusión
Los brazos robóticos colaborativos están transformando la manera en que trabajamos y vivimos. Conociendo los precios y marcas disponibles en el mercado, podrás tomar decisiones informadas para tu proyecto. Si deseas aprender más sobre robótica y electrónica, puedes visitar la Wikipedia sobre robótica.
Los variadores de frecuencia VFD: Instalación y configuración son dispositivos fundamentales en la automatización y control de motores eléctricos. Estos componentes permiten regular la velocidad y el par motor mediante la modificación de la frecuencia y el voltaje de la alimentación. En este artículo, exploraremos cómo instalar y configurar un variador de frecuencia, proporcionando consejos prácticos y ejemplos aplicables tanto para profesionales como para aficionados a la robótica y la electrónica.
Variadores de frecuencia VFD: Instalación y configuración
¿Qué es un Variador de Frecuencia VFD?
Un variador de frecuencia, conocido como VFD (Variable Frequency Drive), es un dispositivo electrónico que controla la velocidad de un motor de corriente alterna (CA) ajustando la frecuencia y la tensión de la corriente suministrada. Entre sus principales ventajas se encuentran el ahorro energético, la mejora en el control del motor y la reducción de costos operativos.
Componentes Clave de un VFD
Rectificador: Convierte la corriente alterna en corriente continua.
Filtro: Suaviza la corriente continua para eliminar picos y oscilaciones.
Inversor: Convierte la corriente continua nuevamente a corriente alterna, pero a la frecuencia deseada.
Controlador: Regula el funcionamiento del variador y permite la programación de parámetros específicos.
Variadores de Frecuencia VFD: Instalación y configuración
La instalación y configuración de variadores de frecuencia VFD puede parecer un reto, pero siguiendo algunos pasos sencillos se puede lograr un correcto funcionamiento. A continuación, se presenta un procedimiento básico para la instalación y configuración de un VFD.
Paso 1: Preparación del Entorno
Antes de comenzar la instalación, asegúrate de contar con las herramientas necesarias y un espacio adecuado para trabajar. Reúne los siguientes materiales:
Variador de frecuencia VFD
Cableado eléctrico adecuado
Multímetro
Destornilladores
Documentación técnica del VFD
Paso 2: Instalación del VFD
1. **Montaje:** Coloca el VFD en un lugar bien ventilado y accesible. Asegúrate de que esté a una distancia adecuada de fuentes de calor y humedad.
2. **Conexiones Eléctricas:** Conecta el VFD a la red eléctrica siguiendo el diagrama de conexión proporcionado por el fabricante. Asegúrate de que el cableado esté correctamente aislado y protegido.
3. **Conexión del Motor:** Conecta el motor al VFD siguiendo las especificaciones del fabricante. Generalmente, se utilizan terminales U, V y W para la conexión de los cables del motor.
Laboratorio de electrónica
Paso 3: Configuración Inicial
Una vez que el variador esté instalado físicamente, es hora de configurarlo:
Acceso al Panel de Control: Enciende el VFD y accede al panel de control. Familiarízate con los botones y la pantalla.
Parámetros Iniciales: Configura los parámetros básicos como la frecuencia nominal, la tensión de alimentación y los límites de velocidad según las especificaciones del motor.
Pruebas de Funcionamiento: Realiza pruebas iniciales para asegurarte de que el motor funcione correctamente al variar la frecuencia. Observa cualquier anomalía durante el funcionamiento.
Paso 4: Ajustes Avanzados
Una vez que el VFD esté funcionando, puedes realizar ajustes más finos para optimizar el rendimiento. Considera los siguientes parámetros:
Rampas de Aceleración y Desaceleración: Configura las rampas para evitar golpes en el motor.
Control de Torque: Ajusta el torque de arranque para evitar sobrecargas.
Protecciones: Activa las protecciones contra sobrecalentamiento y cortocircuitos.
Consideraciones Finales
La correcta instalación y configuración de variadores de frecuencia VFD no solo mejora la eficiencia de los sistemas de motores, sino que también prolonga la vida útil del equipo al reducir el desgaste mecánico. Para más información técnica sobre estos dispositivos, puedes consultar la Wikipedia.
Hoy en día, los VFD son esenciales en diversas aplicaciones, desde la automatización industrial hasta proyectos de robótica en el hogar. No dudes en experimentar y aplicar lo aprendido en tus proyectos.
En el mundo de la electrónica y la robótica, saber cómo crimpar conectores RJ45 pasantes (Pass-through) es una habilidad esencial para establecer conexiones de red confiables. Estos conectores son fundamentales en la creación de redes Ethernet, donde la calidad de la conexión puede afectar la velocidad y la estabilidad de la transmisión de datos. En este artículo, te guiaremos a través de los pasos necesarios para crimpar correctamente estos conectores, asegurando que tus proyectos funcionen sin problemas.
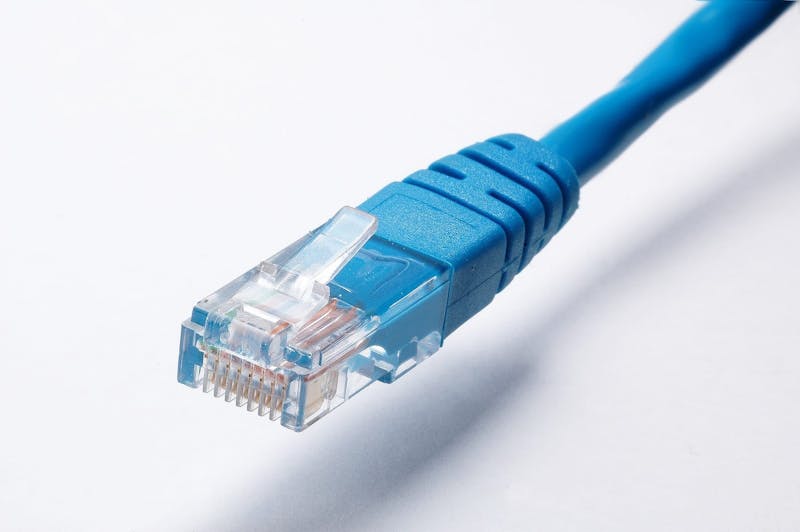
Los conectores RJ45 pasantes, también conocidos como ‘pass-through’, son una variante de los conectores RJ45 estándar. La principal diferencia radica en su diseño, que permite que los cables trenzados pasen a través del conector, facilitando el proceso de crimpar y garantizando que los hilos de cobre estén correctamente alineados antes de ser fijados.
Materiales necesarios
Cables Ethernet (Cat 5e, Cat 6, etc.)
Conectores RJ45 pasantes
Crimpadora para RJ45
Cortador de cables
Cinta métrica o regla
Pasos para crimpar conectores RJ45 pasantes
Cortar el cable a la longitud deseada: Utiliza el cortador de cables para obtener la longitud necesaria de cable Ethernet. Asegúrate de dejar un poco de margen para la manipulación.
Retirar la cubierta del cable: Con cuidado, retira aproximadamente 2-3 cm de la cubierta exterior del cable para exponer los hilos internos. Asegúrate de no dañar los hilos de cobre.
Separar y alinear los hilos: Los cables Ethernet tienen cuatro pares trenzados. Desenreda los pares y alínea los hilos según el estándar T568A o T568B. Es recomendable seguir el mismo estándar en ambos extremos del cable.
Insertar los hilos en el conector: Asegúrate de que los hilos estén en el orden correcto e insértalos en el conector RJ45 pasante. Los hilos deben pasar a través del conector hasta que lleguen al final y se asienten en sus respectivas posiciones.
Crimpar el conector: Utiliza la crimpadora para asegurar el conector en su lugar. Presiona firmemente para que las pequeñas lengüetas metálicas del conector se inserten en los hilos de cobre, creando una conexión sólida.
Probar la conexión: Una vez que hayas crimado ambos extremos del cable, utiliza un probador de cables para verificar que la conexión sea correcta y que no haya cortocircuitos.
¿Por qué elegir conectores RJ45 pasantes?
Los conectores RJ45 pasantes ofrecen varias ventajas en comparación con los conectores tradicionales. Su diseño simplifica el proceso de crimpar, lo que reduce la posibilidad de errores y mejora la calidad de la conexión. Además, permiten que los cables sean más fáciles de manejar y pueden ser útiles para aquellos que están comenzando en el mundo del Arduino y otros proyectos de electrónica.
Preguntas frecuentes sobre ¿Cómo crimpar conectores RJ45 pasantes?
1. ¿Cuál es la diferencia entre un conector RJ45 normal y uno pasante o “Pass Through”?
Esa es la duda más común cuando ves los dos tipos en la ferretería. La gran diferencia está en la punta: en los conectores Pasantes (Pass Through) , los 8 hilos de cobre atraviesan el cuerpo del conector y salen por el frente. Esto te permite verificar el orden de colores (T568A o T568B) antes de usar la crimpadora. Al crimpar, la herramienta corta el sobrante de forma automática. En los RJ45 normales o “ciegos”, los hilos chocan contra la pared interna del conector y no puedes ver si un cable se movió hasta que falla la conexión. Si buscas un trabajo más profesional y con menos margen de error, el pasante es el camino.
2. ¿Necesito una crimpadora especial para conectores RJ45 pasantes?
Sí, es altamente recomendable. No basta con una crimpadora genérica. Las crimpadoras para RJ45 pasantes tienen, además del dado para presionar los pines, una cuchilla integrada en la parte frontal (o en un costado, según el modelo) que corta el excedente de los cables al mismo tiempo que crimpas. Si intentas usar una crimpadora normal, los pines se insertarán, pero te quedarán los 8 alambres sobresaliendo y tendrás que cortarlos manualmente con un cúter, lo que casi siempre daña la pestaña de plástico o deja rebabas que impiden que el plug entre en el puerto.
3. ¿Qué es mejor para crimpar conectores pasantes: la norma T568A o T568B?
La pregunta del millón. Técnicamente, ambas normas funcionan exactamente igual para la velocidad. La diferencia está en el orden de los colores (en la A, el par verde va en los pines 1-2; en la B, el par naranjo). La recomendación más humanizada es: usa la que ya tienes en tu casa u oficina. Si estás partiendo de cero, la norma T568B es la más popular en instalaciones domésticas y comerciales en Latinoamérica. El verdadero secreto para los conectores pasantes es que, al insertar los cables, debes asegurarte de que al llegar al final del conector, los 8 colores se vean exactamente en el mismo orden antes de crimpar; esa es la magia y la ventaja de este sistema.
4. ¿Por qué no funciona mi cable si ya crimpé el conector RJ45 pasante?
Es frustrante, pero suele pasar por 3 errores humanos clásicos:
Mala calidad de la crimpadora pasante: Si la cuchilla no está afilada o la altura de corte es regulable (y está mal calibrada), al cortar el sobrante jala el cable hacia atrás y uno o dos hilos pierden contacto con el pin dorado.
El cable no llegó al fondo: En los pasantes, los hilos deben sobresalir al menos 2-3 mm por la punta transparente antes de cortar. Si dejaste los cables muy cortos y no traspasaron bien, el pin no perforará el aislante.
Te equivocaste de orden: Confiaste en tu memoria y pusiste el blanco-naranja donde iba el blanco-verde. Siempre verifica visualmente la punta transparente antes de apretar la herramienta.
5. ¿Sirve cualquier cable UTP para usar con conectores RJ45 Pass Through?
No, y este es un error muy común. Los conectores Pass Through están diseñados pensando en cable de cobre sólido (el que se usa para cableado de pared o estructural). Si intentas usarlos con cable flexible o multifilar (patch cord) , los pines metálicos no harán buen contacto porque los hilos son demasiado finos y tienden a doblarse en lugar de atravesar. Asegúrate de que el empaque del conector diga “para cable sólido” y que el calibre del cable (AWG) coincida, generalmente 23AWG o 24AWG. Usar el cable correcto evita dolores de cabeza con cámaras IP o puntos de acceso que de repente se desconectan.
Conclusión
Aprender cómo crimpar conectores RJ45 pasantes (Pass-through) es una habilidad valiosa que puede mejorar la calidad de tus proyectos de electrónica y robótica. Con la práctica y los materiales adecuados, podrás crear cables de red que no solo funcionen correctamente, sino que también sean duraderos y confiables. Ahora que conoces los pasos necesarios, ¡es hora de poner manos a la obra y comenzar a crimpar!
En la era de la tecnología inalámbrica, saber cómo hacer un altavoz Bluetooth de alta fidelidad se ha convertido en una habilidad valiosa para los entusiastas de la electrónica y los makers. Este proyecto no solo te permitirá disfrutar de tu música favorita en alta calidad, sino que también te brindará la oportunidad de mejorar tus habilidades en robótica y programación. En este artículo, te guiaremos paso a paso en la construcción de un altavoz Bluetooth que hará que tu experiencia auditiva sea excepcional.
Cómo hacer un altavoz Bluetooth de alta fidelidad
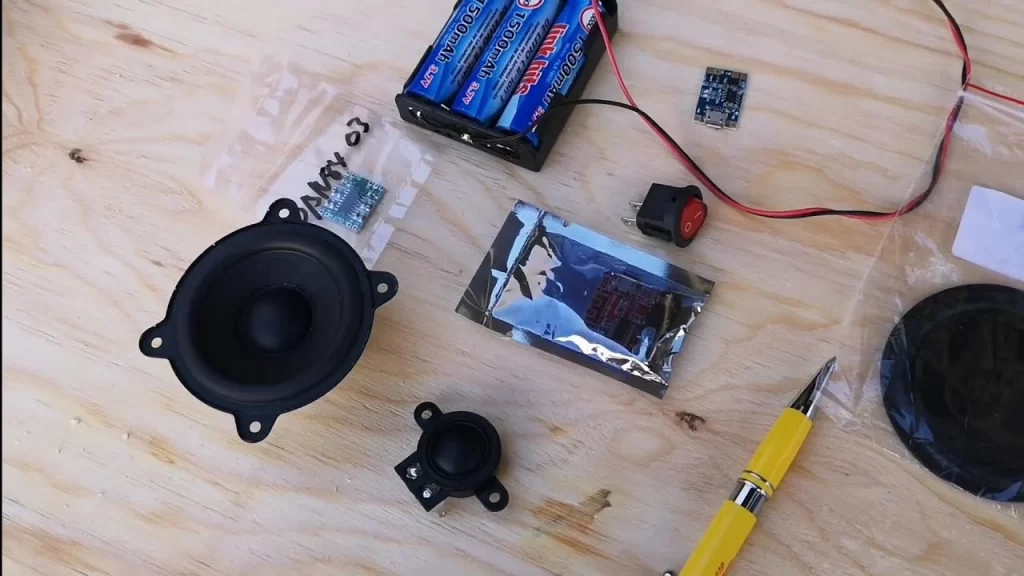
Materiales necesarios
Placa de desarrollo (Arduino o Raspberry Pi)
Módulo Bluetooth (como el HC-05 o HC-06)
Amplificador de audio
Altavoces de alta calidad
Batería recargable
Cables de conexión
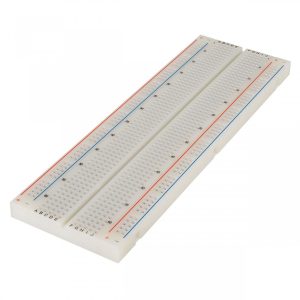
Protoboard o PCB para montaje
Carcasa para el altavoz (opcional)
Pasos para construir el altavoz
A continuación, se describen los pasos necesarios para realizar este proyecto. Asegúrate de tener todos los materiales listos antes de comenzar.
1. Preparación del módulo Bluetooth
El primer paso en cómo hacer un altavoz Bluetooth de alta fidelidad es configurar tu módulo Bluetooth. Conecta el módulo a tu placa de desarrollo siguiendo el esquema de pines adecuado. Asegúrate de que el módulo esté alimentado correctamente y que los pines de transmisión y recepción estén conectados de acuerdo a las especificaciones del fabricante.
2. Conexión del amplificador de audio
Una vez que el módulo Bluetooth esté listo, es hora de conectar el amplificador de audio. Este componente es crucial para asegurar que el sonido se reproduzca con alta fidelidad. Conecta las salidas del módulo Bluetooth a las entradas del amplificador, asegurándote de seguir las instrucciones del fabricante para evitar cortocircuitos.
3. Montaje de los altavoces
Ahora que el amplificador está conectado, es momento de añadir los altavoces. Escoge altavoces de buena calidad que se adapten a tus necesidades. Conéctalos a las salidas del amplificador. Puedes optar por un sistema estéreo para mejorar la experiencia auditiva.
Laboratorio de electrónica
4. Programación y configuración
Con todos los componentes conectados, el siguiente paso es programar tu placa de desarrollo. Si estás utilizando Arduino, puedes escribir un código sencillo que permita la conexión Bluetooth y la reproducción de audio. Existen muchas bibliotecas disponibles que facilitan esta tarea. Consulta la documentación oficial de Arduino para obtener ejemplos de código y guías de programación.
5. Pruebas y ajustes
Una vez que hayas cargado el programa en tu placa de desarrollo, es hora de realizar pruebas. Conecta tu teléfono o dispositivo al altavoz Bluetooth y reproduce música. Ajusta los niveles de volumen y ecualización según sea necesario para obtener la mejor calidad de sonido posible.
Cómo hacer un altavoz Bluetooth de alta fidelidad: Consejos adicionales
Considera utilizar una carcasa para proteger los componentes y mejorar la estética del altavoz.
Si es posible, utiliza un amplificador de mayor potencia para obtener un sonido más robusto.
Experimenta con diferentes configuraciones de altavoces y amplificadores para encontrar la combinación que mejor se adapte a tus preferencias.
Conclusión
En resumen, cómo hacer un altavoz Bluetooth de alta fidelidad es un proyecto emocionante que combina electrónica, programación y creatividad. Al seguir estos pasos, podrás construir un dispositivo que no solo es funcional, sino que también te proporcionará una experiencia auditiva de alta calidad. No dudes en experimentar y personalizar tu altavoz para hacerlo único.
La Consola retro portátil con Raspberry Pi Zero 2 W ha revolucionado la forma en que los amantes de los videojuegos retro pueden disfrutar de sus títulos favoritos. Este pequeño microcontrolador ofrece un rendimiento sorprendente en un formato compacto y es perfecto para aquellos que buscan revivir la nostalgia de los juegos clásicos, desde NES hasta Game Boy. Con un poco de conocimiento en programación y electrónica, puedes construir tu propia consola de juegos portátil en un abrir y cerrar de ojos.
Consola retro portátil con Raspberry Pi Zero 2 W
Componentes Necesarios para tu Proyecto
Para comenzar con tu consola, necesitarás reunir varios componentes esenciales. Aquí hay una lista de lo que necesitarás:
Raspberry Pi Zero 2 W: Este es el corazón de tu consola. Su bajo consumo energético y tamaño lo hacen ideal para proyectos portátiles.
Tarjeta SD: Necesitarás una tarjeta microSD para instalar el sistema operativo y almacenar tus juegos.
Pantalla: Una pantalla LCD o TFT de bajo consumo te permitirá ver tus juegos en acción.
Batería: Una batería recargable para proporcionar energía a tu dispositivo.
Controles: Puedes optar por botones físicos o un joystick para la navegación y el juego.
Caja: Una carcasa para albergar todos los componentes y darle un aspecto profesional a tu consola.
Instalación del Software
Una vez que tengas todos los componentes, el siguiente paso es instalar el software necesario. Te recomendamos utilizar RetroPie, una plataforma que facilita emular una gran variedad de sistemas de videojuegos. A continuación, te explicamos cómo hacerlo:
Descarga la imagen de RetroPie desde su sitio oficial.
Utiliza una herramienta como balenaEtcher para grabar la imagen en tu tarjeta microSD.
Inserta la tarjeta microSD en tu Raspberry Pi Zero 2 W.
Conecta la pantalla, los controles y la batería.
Configuración de los Controles
Una vez que RetroPie esté instalado, deberás configurar tus controles. Al encender la consola, RetroPie te guiará a través del proceso de configuración de los botones. Asegúrate de que todos los controles funcionen correctamente antes de comenzar a jugar.
Consola Retro Portátil con Raspberry Pi Zero 2 W
La Consola retro portátil con Raspberry Pi Zero 2 W no solo es un proyecto divertido, sino que también es una excelente manera de aprender sobre electrónica y programación. Con su capacidad para emular múltiples sistemas, tendrás acceso a una vasta biblioteca de juegos. Además, puedes personalizar tu consola con carcasas y controles únicos para hacerla verdaderamente tuya.
Laboratorio de electrónica
Consejos para Mejorar tu Consola
Si deseas llevar tu consola al siguiente nivel, considera los siguientes consejos:
Mejora la refrigeración: Aunque el Raspberry Pi Zero 2 W no genera tanto calor, añadir un pequeño ventilador puede ayudar a mantener la temperatura baja durante largas sesiones de juego.
Uso de carcasas impresas en 3D: Imprimir en 3D una carcasa personalizada no solo protegerá tu consola, sino que también le dará un aspecto único.
Software adicional: Explora otras aplicaciones y emuladores disponibles en RetroPie para ampliar la funcionalidad de tu consola.
Conclusiones
Construir una Consola retro portátil con Raspberry Pi Zero 2 W es un proyecto que combina creatividad, tecnología y diversión. Al finalizar, no solo tendrás una consola funcional, sino también un profundo conocimiento sobre los componentes y el software que la hacen posible. ¡No esperes más y comienza tu aventura en el mundo de la emulación retro!
Si alguna vez te has preguntado cómo automatizar un gallinero: puerta y comedero, este artículo es para ti. La automatización de un gallinero no solo mejora la calidad de vida de tus aves, sino que también facilita su cuidado diario. En este tutorial, aprenderás a implementar un sistema que controle la apertura y cierre de la puerta del gallinero, así como la dispensación de alimento mediante un comedero automatizado.
Cómo automatizar un gallinero: Puerta y comedero
¿Por qué automatizar un gallinero?
La automatización en la agricultura y el cuidado de animales es una tendencia creciente. Al automatizar un gallinero, puedes:
Asegurarte de que tus gallinas tengan acceso a su espacio sin interrupciones.
Controlar la alimentación de manera eficiente, evitando el desperdicio.
Ahorrar tiempo en las tareas diarias.
Materiales necesarios
Para llevar a cabo este proyecto, necesitarás los siguientes componentes:
Laboratorio de electrónica y robótica
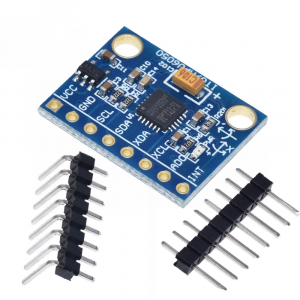
Microcontrolador: Un Arduino Uno o similar.
Módulo de relé: Para controlar el motor de la puerta y el dispensador de alimento.
Motor: Un motor de corriente continua o servo motor para abrir y cerrar la puerta.
Sensor de luz: Para detectar si es de día o de noche.
Comedero automático: Un módulo que permita dispensar alimento.
Cableado y protoboard: Para realizar las conexiones necesarias.
Cómo automatizar un gallinero: Puerta y comedero
A continuación, te mostramos cómo puedes implementar la automatización de la puerta y el comedero de tu gallinero.
Conexiones eléctricas
Realiza las siguientes conexiones:
Conecta el motor al módulo de relé.
Conecta el sensor de luz al Arduino.
Conecta el comedero automático al módulo de relé.
Código de ejemplo
El siguiente código de Arduino es un ejemplo básico para controlar la puerta y el comedero:
const int motorPin = 9; // Pin del motor
const int relayPin = 8; // Pin del relay
const int lightSensorPin = A0; // Pin del sensor de luz
void setup() {
pinMode(motorPin, OUTPUT);
pinMode(relayPin, OUTPUT);
Serial.begin(9600);
}
void loop() {
int lightLevel = analogRead(lightSensorPin);
if (lightLevel < 500) { // Si está oscuro
digitalWrite(motorPin, HIGH); // Abre la puerta
delay(10000); // Mantén abierta por 10 segundos
digitalWrite(motorPin, LOW); // Cierra la puerta
digitalWrite(relayPin, HIGH); // Dispensa alimento
delay(5000); // Dispensa alimento por 5 segundos
digitalWrite(relayPin, LOW);
}
delay(60000); // Espera un minuto antes de verificar de nuevo
}
Errores comunes y consejos de experto
Al implementar tu sistema automatizado, ten en cuenta los siguientes errores comunes:
Conexiones incorrectas: Asegúrate de que todas las conexiones estén firmes y correctas.
Falta de alimentación del microcontrolador: Verifica que tu Arduino esté correctamente alimentado.
Sensor de luz mal calibrado: Ajusta la sensibilidad del sensor para que funcione adecuadamente durante el día y la noche.
Además, considera añadir una batería de respaldo para garantizar que tu sistema siga funcionando en caso de un corte de energía.
Conclusión
Automatizar un gallinero es un proyecto gratificante que mejora el bienestar de tus aves y facilita su cuidado. Con los componentes adecuados y un poco de programación, puedes tener un sistema eficiente que maneje tanto la puerta como el comedero. Para más información sobre los componentes, puedes visitar la documentación oficial de Arduino.
El diseño de fijaciones y utillajes en CNC para piezas irregulares es un aspecto crucial en la fabricación moderna. A menudo, los proyectos de mecanizado involucran piezas que no tienen formas estándar, lo que puede complicar su sujeción y manipulación. Sin una fijación adecuada, el proceso de mecanizado puede resultar en errores, piezas mal fabricadas o incluso daños en la máquina. Por lo tanto, aprender cómo diseñar fijaciones y utillajes en CNC para piezas irregulares no solo mejora la calidad del trabajo, sino que también optimiza la eficiencia del proceso. En este artículo, exploraremos los conceptos fundamentales, los tipos de fijaciones, los materiales necesarios y un paso a paso para implementar estas técnicas en tus proyectos.
Cómo diseñar fijaciones y utillajes en CNC para piezas irregulares
¿Qué es y para qué sirve?
Las fijaciones y utillajes son herramientas diseñadas para mantener las piezas en su lugar durante el proceso de mecanizado en máquinas CNC. Estas fijaciones son esenciales para asegurar que la pieza no se mueva, lo que podría resultar en cortes imprecisos y desperdicio de material. Los utillajes, por su parte, son estructuras diseñadas para facilitar el manejo y la operación de la maquinaria, permitiendo un trabajo más eficiente y seguro. Para comprender en profundidad el funcionamiento y diseño de estas herramientas, puedes consultar la documentación sobre CNC. Al implementar un sistema de fijación y utillaje adecuado, se puede aumentar significativamente la calidad de las piezas producidas y reducir el tiempo de producción.
Tipos y variantes disponibles
Fijaciones mecánicas: Utilizan tornillos, prensas o garras para sujetar la pieza.
Fijaciones magnéticas: Emplean imanes para mantener la pieza en su lugar, ideales para materiales ferrosos.
Utillajes personalizados: Diseñados específicamente para una pieza o serie de piezas, asegurando un ajuste perfecto.
Utillajes modulares: Permiten la creación de diferentes configuraciones para adaptarse a varias piezas y procesos.
Cómo diseñar fijaciones y utillajes en CNC para piezas irregulares — Cómo elegir o implementar
Tipo de fijación
Ventajas
Desventajas
Fijaciones mecánicas
Fáciles de ajustar y reutilizables.
Pueden causar marcas en la superficie de la pieza.
Fijaciones magnéticas
Rápidas de colocar y quitar.
Limitadas a materiales magnéticos.
Utillajes personalizados
Diseño exacto para la pieza.
Costoso y requiere tiempo para fabricar.
Utillajes modulares
Flexibles y adaptables a diferentes piezas.
Requieren un mayor espacio de almacenamiento.
Materiales y componentes necesarios
Aluminio: Ligero y fácil de mecanizar, ideal para utillajes.
Acero: Muy resistente, adecuado para fijaciones que requieren alta durabilidad.
Imanes: Utilizados en fijaciones magnéticas para sostener piezas de metal.
Plástico de ingeniería: Útil para prototipos y utillajes ligeros.
Existen varios errores comunes al diseñar y utilizar fijaciones y utillajes, tales como:
Fijación inadecuada: No usar el tipo correcto de fijación puede llevar a piezas mal mecanizadas. Asegúrate de elegir el sistema adecuado para cada pieza.
Espacio insuficiente: No dejar suficiente espacio para el mecanizado puede causar daños. Siempre considera las herramientas y sus trayectorias al diseñar.
Material inadecuado: Usar materiales poco resistentes puede afectar la durabilidad de la fijación. Escoge materiales que soporten las condiciones del trabajo.
Falta de pruebas: No probar el ajuste de la fijación antes de mecanizar puede resultar en fallos. Siempre verifica el funcionamiento del sistema antes de iniciar el proceso.
Consejos de experto
Planifica tu diseño: Tómate el tiempo necesario para planificar, ya que un buen diseño inicial ahorra tiempo y recursos.
Utiliza software adecuado: Usa programas de diseño que te permitan simular el proceso y prever posibles problemas.
Documenta el proceso: Mantén un registro de tus fijaciones y utillajes para futuras referencias y mejoras.
Mantén tu equipo actualizado: Asegúrate de que las herramientas y maquinaria estén en óptimas condiciones para evitar errores.
Consulta con expertos: No dudes en buscar asesoría si te enfrentas a desafíos complejos en el diseño.
Preguntas frecuentes
¿Qué materiales son los mejores para fijaciones en CNC?
Los materiales como el aluminio y el acero son excelentes para fijaciones debido a su resistencia y durabilidad. Sin embargo, la elección del material también dependerá de la aplicación específica y del tipo de pieza a mecanizar.
¿Cómo se determina la mejor fijación para una pieza?
La mejor fijación se determina analizando la forma de la pieza, el tipo de mecanizado y las fuerzas que estarán en juego durante el proceso. Es importante considerar estas variables para seleccionar el sistema más adecuado.
¿Es necesario un utillaje personalizado para cada pieza irregular?
No siempre es necesario crear un utillaje personalizado para cada pieza. A veces, los utillajes modulares pueden adaptarse a diferentes formas y tamaños, lo que puede ser más eficiente.
¿Cómo puedo mejorar la precisión de mis fijaciones?
Para mejorar la precisión, asegúrate de que las fijaciones estén bien diseñadas y fabricadas. Además, realizar pruebas de ajuste antes de mecanizar puede ayudar a garantizar un posicionamiento correcto.
¿Qué software es recomendable para diseñar fijaciones y utillajes?
Existen varios programas CAD que son altamente recomendados para diseñar fijaciones y utillajes, como Autodesk Fusion 360 y SolidWorks, que ofrecen funcionalidades avanzadas para simulaciones y diseño asistido.
CONCLUSIÓN
Aprender a diseñar fijaciones y utillajes en CNC para piezas irregulares es fundamental para cualquier entusiasta de la robótica y la fabricación. Al implementar los conocimientos adquiridos en este artículo, podrás optimizar tus procesos de mecanizado, mejorar la calidad de tus piezas y reducir costos. La práctica continua y el aprendizaje de nuevas técnicas te permitirán seguir mejorando tus habilidades en el diseño y fabricación de componentes personalizados.
La construcción de una máquina recreativa Arcade desde cero es un proyecto apasionante que combina electrónica, programación y diseño. En este artículo, te guiaré a través de los pasos necesarios para crear tu propia máquina recreativa, desde la selección de componentes hasta la programación del software.
Construcción de una máquina recreativa Arcade desde cero
Materiales necesarios
Placa de desarrollo: Puedes optar por una Raspberry Pi o un Arduino, dependiendo de tus necesidades.
Pantalla: Una pantalla LCD o un monitor de computadora será esencial para mostrar los juegos.
Controladores: Joysticks y botones para la interacción del usuario.
Carcasa: Puedes construirla con madera, MDF o adquirir una carcasa prehecha.
Fuente de alimentación: Asegúrate de tener una fuente adecuada para alimentar todos los componentes.
Diseño y ensamblaje
Antes de comenzar la construcción de una máquina recreativa Arcade desde cero, es fundamental planificar el diseño. El tamaño y la forma de la carcasa deben ajustarse a los componentes que has elegido. Puedes encontrar planos en línea o diseñar tu propia carcasa utilizando software de modelado 3D.
Una vez que tengas el diseño, corta los materiales según las especificaciones. Asegúrate de dejar espacio para la pantalla, los controles y la placa de desarrollo. Usa tornillos y pegamento para asegurar todas las piezas. La robustez de la estructura es clave para garantizar la durabilidad de tu máquina recreativa.
Conexión de componentes
Con la carcasa ensamblada, es momento de conectar los componentes. Si has elegido una Raspberry Pi, necesitarás instalar un sistema operativo como RetroPie, que es ideal para emular juegos clásicos. Conecta la pantalla a la Raspberry Pi y verifica que esté funcionando correctamente.
Los joysticks y botones se conectan a través de una interfaz USB o usando pines GPIO en la placa de desarrollo. Asegúrate de seguir un esquema de conexión para evitar errores. Puedes usar una placa base como intermediaria para facilitar las conexiones.
Programación del software
Para que tu máquina recreativa funcione, necesitarás programar el software. Si optaste por RetroPie, la configuración es bastante sencilla. Sin embargo, si deseas crear tu propio software desde cero, puedes optar por lenguajes de programación como Python o C++. Asegúrate de incluir la lógica de control para que los botones y joysticks respondan correctamente a los comandos.
Laboratorio de electrónica
Además, puedes personalizar la interfaz de usuario y agregar tus juegos favoritos. Recuerda probar cada juego para asegurarte de que funcione adecuadamente en tu máquina recreativa.
Pruebas y ajustes
Una vez que todo esté conectado y programado, es hora de realizar pruebas. Enciende la máquina y verifica que todos los componentes funcionen como se espera. Realiza ajustes en la configuración del software si es necesario. Asegúrate de que la experiencia de juego sea fluida y que los controles respondan de manera precisa.
Si encuentras problemas, revisa las conexiones y el código en busca de errores. La depuración puede ser una parte frustrante pero esencial del proceso de construcción.
Conclusión
La construcción de una máquina recreativa Arcade desde cero es una excelente manera de explorar tus habilidades en electrónica y programación. No solo aprenderás sobre hardware y software, sino que también disfrutarás de tus juegos favoritos en un dispositivo hecho por ti mismo. Recuerda compartir tus logros con la comunidad Maker y seguir experimentando con nuevas ideas y mejoras para tu máquina recreativa.
Introducción a los Sistemas de Paracaídas para Drones Comerciales
Los sistemas de paracaídas para drones comerciales son un componente esencial para garantizar la seguridad de estos vehículos aéreos no tripulados. Con el creciente uso de drones en aplicaciones comerciales, como la entrega de paquetes, la fotografía aérea y la supervisión agrícola, la necesidad de sistemas de seguridad efectivos se ha vuelto primordial. Estos dispositivos permiten que, en caso de una falla técnica o pérdida de señal, el dron descienda de manera controlada, minimizando el riesgo de daños y accidentes.
Funcionamiento de los Sistemas de Paracaídas
Un sistema de paracaídas para drones típicamente consiste en un paracaídas, un mecanismo de liberación y un sensor que detecta la caída libre o el mal funcionamiento. Cuando el sensor activa el mecanismo de liberación, el paracaídas se despliega, creando resistencia al aire y permitiendo un descenso controlado. Esto no solo protege el dron, sino también las personas y propiedades en el área de aterrizaje.
Beneficios de Usar Sistemas de Paracaídas
Seguridad: Reduce el riesgo de accidentes en caso de fallos.
Protección del equipo: Minimiza daños en drones costosos.
Confiabilidad: Brinda tranquilidad a los operadores y usuarios finales.
Sistemas de Paracaídas para Drones Comerciales en el Mercado
Existen diversas opciones en el mercado para sistemas de paracaídas para drones comerciales. Algunos de los más destacados incluyen sistemas automáticos que se activan al detectar una caída libre, y otros que requieren intervención manual. Las marcas más reconocidas suelen ofrecer versiones personalizables que se adaptan a diferentes modelos de drones.
Tipos de Sistemas de Paracaídas
Al considerar un sistema de paracaídas, es importante entender las diferencias entre los modelos. Algunos de los tipos más comunes son:
Paracaídas de despliegue automático: Se activan al percibir un descenso abrupto.
Paracaídas manuales: Requieren que el operador active el sistema en caso de emergencia.
Paracaídas de seguridad de múltiples capas: Proporcionan una mayor área de superficie para un descenso más lento.
Aspectos a Considerar al Elegir un Sistema de Paracaídas
Cuando se trata de elegir el sistema de paracaídas adecuado, es fundamental analizar varios factores:
Peso: El sistema debe ser ligero para no afectar la capacidad de vuelo del dron.
Tamaño: Debe ser acorde con el tamaño del dron para asegurar un despliegue efectivo.
Facilidad de instalación: Un sistema fácil de instalar y desinstalar es preferible para los hobbistas.
Integración con Sistemas de Control de Vuelo
La integración de sistemas de paracaídas en drones comerciales con sistemas de control de vuelo es crucial para su funcionamiento. Los controladores de vuelo modernos pueden ser programados para activar el paracaídas en situaciones de emergencia. Esto implica un conocimiento de programación y electrónica, que puede ser un desafío, pero también una excelente oportunidad de aprendizaje para los makers y estudiantes.
Programación y Electrónica
Los entusiastas de la robótica y la electrónica a menudo se sentirán atraídos por la idea de personalizar su propio sistema de paracaídas. Utilizando placas de desarrollo como Arduino o Raspberry Pi, se pueden crear sistemas de detección y activación que se adapten a las necesidades específicas del dron. Para obtener más información sobre la programación de drones, puedes visitar Wikipedia sobre Drones.
Regulaciones y Normativas
Es importante considerar las regulaciones locales relacionadas con el uso de drones y sistemas de seguridad como los paracaídas. Muchos países exigen que los drones utilizados comercialmente cuenten con sistemas de seguridad aprobados. Asegúrate de estar informado sobre las normativas pertinentes en tu área para evitar posibles sanciones.
Conclusión
Los sistemas de paracaídas para drones comerciales representan una inversión valiosa en seguridad y protección. Al considerar la compra e implementación de uno, es fundamental evaluar las opciones disponibles, los requerimientos técnicos y las normativas aplicables. Con el avance de la tecnología, estos sistemas se vuelven cada vez más eficientes y accesibles, lo que permite a los operadores de drones garantizar un vuelo seguro y responsable.