Las pinzas de precisión de titanio para componentes 0402 son herramientas esenciales para los entusiastas de la electrónica y la robótica, especialmente cuando se trabaja con componentes de tamaño muy pequeño. Estos componentes, como resistencias y condensadores de tamaño 0402, requieren un manejo delicado y preciso. La dificultad de manipular estos diminutos elementos puede convertirse en un desafío, y aquí es donde las pinzas de precisión hacen la diferencia. La elección de un material como el titanio asegura durabilidad y resistencia a la corrosión, lo que las convierte en una opción ideal para el trabajo diario en el laboratorio o en proyectos maker. Este artículo explorará en detalle qué son estas pinzas, sus tipos, cómo elegirlas, y ofrecerá consejos útiles para su uso.
¿Qué es y para qué sirve?
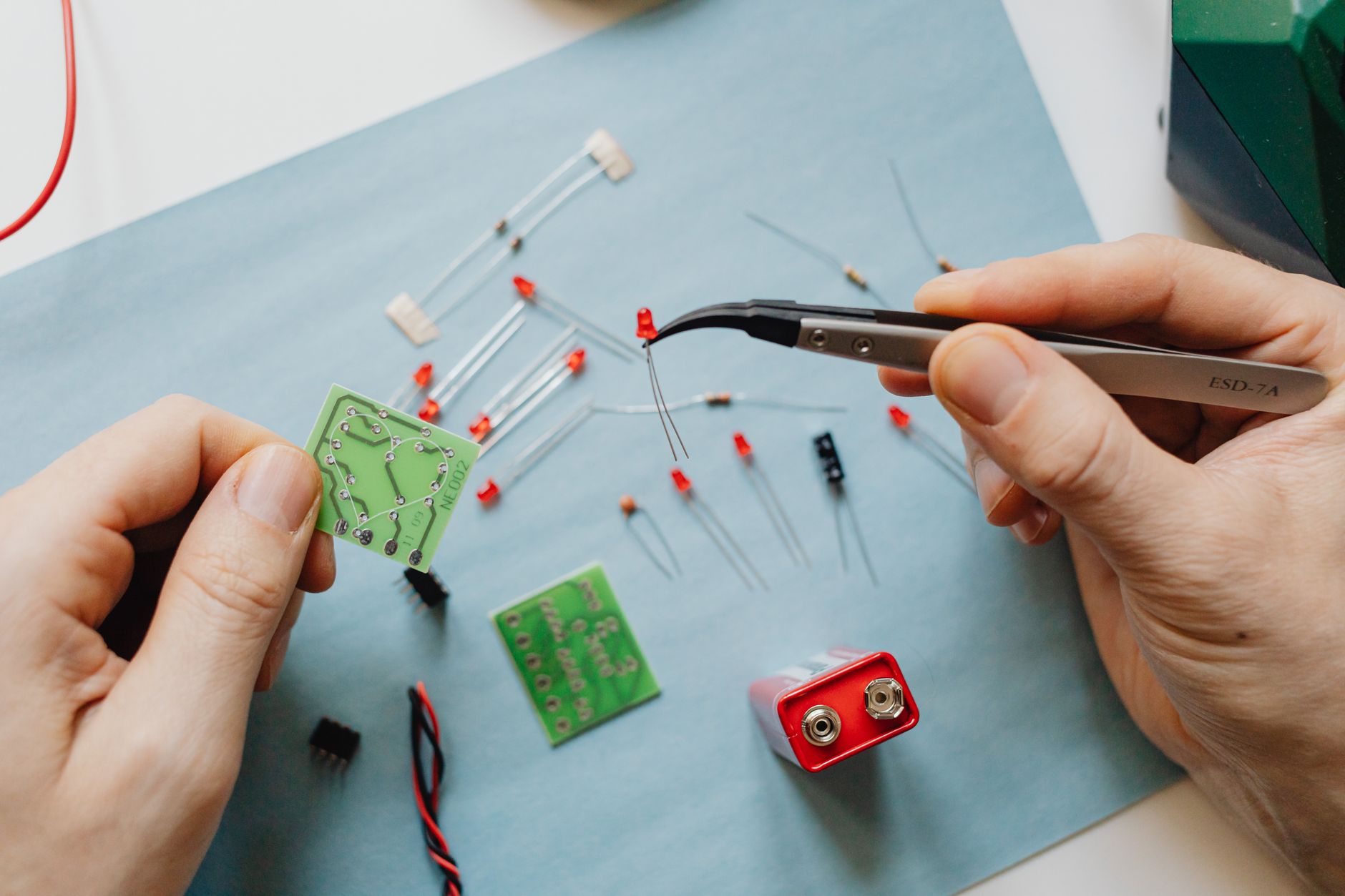
Las pinzas de precisión de titanio para componentes 0402 son herramientas diseñadas para manipular componentes electrónicos de pequeño tamaño con alta precisión. Su diseño ergonómico y su material ligero permiten un agarre firme sin dañar los componentes delicados. Estas pinzas son especialmente útiles en aplicaciones donde se requiere un alto grado de control, como en la soldadura y el ensamblaje de circuitos impresos. El titanio, conocido por su resistencia y ligereza, proporciona una ventaja significativa sobre las pinzas de acero inoxidable o plástico, ya que no solo son más duraderas, sino que también ofrecen un mejor desempeño en ambientes de alta temperatura. Para aquellos que buscan calidad, las pinzas de precisión de Adafruit son una excelente opción que combina funcionalidad y ergonomía.
Tipos y variantes disponibles
Existen varios tipos y variantes de pinzas de precisión, cada una diseñada para satisfacer necesidades específicas. A continuación se presentan algunos de los tipos más comunes:

- Pinzas de punta fina: Ideales para trabajar con componentes muy pequeños, permiten un agarre preciso.
- Pinzas antideslizantes: Estas pinzas tienen superficies especiales que evitan que los componentes se resbalen durante el manejo.
- Pinzas de acero inoxidable: Aunque más pesadas, ofrecen una buena resistencia a la corrosión, pero no son tan ligeras como las de titanio.
- Pinzas de titanio: Estas son las más recomendadas para trabajos de precisión debido a su ligereza y resistencia.
Pinzas de precisión de titanio para componentes 0402 — Cómo elegir o implementar
| Característica | Pinzas de Titanio | Pinzas de Acero Inoxidable |
|---|---|---|
| Peso | Ligeras | Pesadas |
| Resistencia a la corrosión | Alta | Moderada |
| Precio | Más elevado | Más accesible |
| Durabilidad | Alta | Media |
Al elegir las pinzas adecuadas, considera las características que son más importantes para tu tipo de trabajo. Las pinzas de precisión de titanio para componentes 0402 son ideales si buscas una herramienta ligera y duradera que ofrezca un excelente control. Además, asegúrate de practicar su uso en componentes menos críticos antes de trabajar en proyectos más importantes.
Materiales y componentes necesarios
Para trabajar de manera efectiva con las pinzas de precisión, es importante contar con los siguientes materiales:
- Pinzas de precisión de titanio: La herramienta principal para el manejo de componentes de tamaño 0402.
- Componentes 0402: Resistencias, condensadores y otros elementos que se trabajarán.
- Estación de soldadura: Para la unión de componentes en placas de circuito.
- Multímetro: Para verificar la continuidad y el funcionamiento de los circuitos.
Si estás en Chile, puedes compra el módulo en UKRABOT Chile directamente desde la tienda con despacho a todo el país. Esto te asegurará tener acceso a los mejores componentes para tus proyectos.
Guía paso a paso
-
Identifica los componentes 0402 que necesitas manejar. Asegúrate de tener todos los elementos a mano.
-
Prepara tu estación de trabajo, asegurándote de que esté limpia y ordenada. Esto hará que el proceso de ensamblaje sea más eficiente.
-
Utiliza las pinzas de precisión de titanio para componentes 0402 para tomar el primer componente. Asegúrate de sujetarlo suavemente pero con firmeza.
-
Coloca el componente en la ubicación deseada en la placa de circuito. Hazlo con cuidado para evitar daños.
-
Utiliza la estación de soldadura para fijar el componente a la placa. Asegúrate de que la soldadura esté en la temperatura adecuada para evitar daños.
-
Verifica el funcionamiento del circuito utilizando un multímetro. For more in-depth guides, check out electronics tutorials for makers.
Errores comunes y cómo evitarlos
Al trabajar con pinzas de precisión, es fácil cometer algunos errores comunes. Aquí hay algunos y cómo puedes evitarlos:
- Uso excesivo de fuerza: Aplica solo la presión necesaria al manejar los componentes, ya que un agarre demasiado fuerte puede dañarlos.
- Desorden en el área de trabajo: Mantén tu espacio limpio y organizado para evitar perder componentes pequeños.
- No verificar la temperatura de la soldadura: Asegúrate de que la estación de soldadura esté configurada correctamente para evitar quemar los componentes.
- No practicar antes de trabajar en proyectos importantes: Realiza pruebas en componentes menos críticos para familiarizarte con las pinzas y el proceso.
Consejos de experto
- Siempre utiliza gafas de seguridad al trabajar con componentes electrónicos para proteger tus ojos.
- Practica el uso de las pinzas con componentes de mayor tamaño antes de pasar a los más pequeños.
- Ten a mano un organizador de componentes para evitar pérdidas durante el ensamblaje.
- Revisa la calidad de las pinzas antes de cada uso para asegurarte de que no estén dañadas.
Preguntas frecuentes
¿Por qué elegir pinzas de titanio sobre otras opciones?
Las pinzas de titanio son más ligeras y resistentes a la corrosión, lo que las hace ideales para un uso prolongado en entornos de trabajo exigentes. Su durabilidad también las convierte en una inversión a largo plazo.
¿Son adecuadas para principiantes?
Sí, las pinzas de precisión son herramientas útiles incluso para principiantes, pero es importante practicar su uso para familiarizarse con la técnica adecuada y evitar daños a los componentes.
¿Cómo limpiar las pinzas de precisión?
Se recomienda limpiar las pinzas con un paño suave y, si es necesario, con un poco de alcohol isopropílico para eliminar residuos de soldadura o suciedad.
¿Qué tamaño de componentes se pueden manejar?
Las pinzas de precisión de titanio son ideales para componentes de tamaño 0402, pero también pueden utilizarse para otros tamaños más grandes con un manejo adecuado.
¿Dónde puedo encontrar más recursos sobre el uso de pinzas?
Existen muchos recursos en línea que ofrecen tutoriales y guías. Puedes buscar en sitios especializados o consultar electronics tutorials for makers para obtener información detallada.
Conclusión
Las pinzas de precisión de titanio para componentes 0402 son herramientas valiosas para cualquier persona que trabaje con electrónica. Su diseño y material ofrecen ventajas que facilitan el manejo de componentes pequeños y delicados. Al seguir las recomendaciones y guías presentadas, podrás maximizar la efectividad de tu trabajo y evitar errores comunes. Continúa explorando y aprendiendo sobre proyectos maker y robótica para mejorar tus habilidades en el campo.
También te puede interesar:
Entrena un modelo de detección de defectos industriales
Componentes relacionados